従来のニコンFマウントレンズ(800mm)をデジタルカメラで使用するCマウントレンズに変換します。
光学設計技術と従来装置が理解できないと開発できない装置です。ベルテックス社では現在も特注で行っています。

アンドロイド表示サンプル


android端末の評価


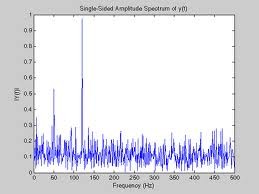
AD変換精度におけるカーブフィット法の有効性について
1.概要について
実装されたAD変換の有効精度を求める一般的な方法は、FFT法があります。
この方法は、入力された周波数の成分とそれ以外の成分がどれくらい比率で
あるかを求める方法です。
この方法で用いられるデータ収集回数は1024、2048などです。
データ収集時、1回程度の不具合があった場合では、エラーを検出する事が
非常に難しいのが現実です。
このため弊社では、ダイナミック試験法であるカーブフィット法を用いています。
この方法で行うと、1回の不具合でも検出できる事と、1回のAD変換で得られる
精度を求める事ができます。

2.現状について
信号源として、精度の高い正弦波を用います。
収集する周期は、1周期半以上必要です。
収集したデータを数式的に処理します。
演算式については、下記の資料が参考になります。
TI社ADコンバータ性能のダイナミックテスト方法
http://focus.tij.co.jp/jp/lit/an/jaja208/jaja208.pdf
実例は下記を参照してください。
http://www.md-system.jp/how_how/ad.html
マイコン用OS(略称:マイクロOS)の有効性について
1.概要について
弊社マイクロOSの概念は、マイコンの草創期から作りました。
当時、8085(8ビット)や8086(16ビット)用に作りました。
マイコン草創期は、単機能の動作を確実に行う事が重視されました。
このため複合動作を伴う場合は、割込みにより優先順位を決める方法で
行われていました。この方法では、早い動作が重なった場合などの処理が
逆に複雑になる事が判りました。
そこで、処理を時系列に行う事で、複合的に処理する方法が考案され
この方法がマイクロOSの基本概念になります。
2.現状について
マイクロOSの機能を有効に使用するためには、汎用的なOSが使用できない
マイコンに使用する事が重要です。これまでに開発したマイクロOSは、
・PICマイコン(マイクロチップ社製)
・H8マイコン(ルネサス社製)
・FLマイコン(富士通社製)
マイクロOSで重要な要素は、時間概念とスケジューラです。
時間概念は、最低1本のタイマー割込みを用います。
タイマー割込みは、マイコンで異なりますが、数μS~数mSの時間を用います。
スケジューラは、処理数によって異なりますが、数本程度用意します。
スケジューラとは、タスクコントローラと同じ意味を持ちます。
スケジューラ管理は、マイコンで異なります。
3.有効性について
マイクロOSを用いた製品では、ハードウエアの機能を最大限に使用できる事と
ソフト開発及び修正が短時間で行える事です。
デバックにおいても、制御部分を単独処理に出来るので、不具合を最低限に
抑える事ができます。
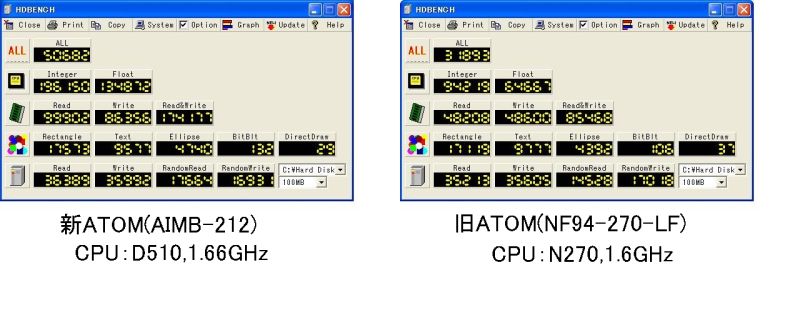
ATOM-D510の評価
新型ATOM-D510の評価を行いました。
評価に使用したCPUは、ATOM型D510とN270、セルロンM1.7GHzです。
新型ATOM-D510装置(写真)

ベンチマークテストの結果
HP社nx6320(CeleronM 1.7GHz)と比較してグラフィックスの描画速度は遅いです
が、演算スピードは1.6倍も速くなっています。
")
起動時間はsATA-HDD使用時、N270が48秒対し、D510は約35秒です。
特にCFにした場合26秒になり30秒を切るので体感的にも相当速く感じます。
[起動時間] sATA-HDD CF
新ATOM 35秒26秒 26秒
旧ATOM 48秒 32秒
消費電力は、N270が18Wに対し、D510は22Wと少し増えています。
(sATA-HDD、LCDなし)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ブログ
MD-SYSTEMのリアルタイムなブログ
これから、適宜更新していく予定です。