BLE V5: MDBT42Q

月: 2021年4月
4-20mA(H8)
;=======================;
; AD 5410 SET TEST ;
;=======================;
BCLR #4,@P4DR ; DATA: 0
BCLR #5,@P4DR ; CLK: 0
BCLR #6,@P4DR ; LACH: 0
MOV.L #1000,ER5 ; 1000mS wait
JSR @WAIT_TLW_TIME
JSR @DSET9
;;;; reset: 56h+00h+01h ; reset
MOV.B #H’56,R0L ;
JSR @DSET1
MOV.B #H’00,R0L ;
JSR @DSET1
MOV.B #H’01,R0L ;
JSR @DSET1
JSR @DSET9
MOV.L #1000,ER5 ; 1000mSwait
JSR @WAIT_TLW_TIME
;;;; CONTROL: 55h+10h+05h ; 4-20mA ENABLE
MOV.B #H’55,R0L ;
JSR @DSET1
MOV.B #H’10,R0L ;
JSR @DSET1
MOV.B #H’05,R0L ;
JSR @DSET1
JSR @DSET9
MOV.L #1000,ER5 ; 1000mSwait
JSR @WAIT_TLW_TIME
;;;; SET DATA: 01h+00h+00h ; 4mA SET
DALP:
MOV.B #H’01,R0L ;
JSR @DSET1
MOV.B #H’00,R0L ;
JSR @DSET1
MOV.B #H’00,R0L ;
JSR @DSET1
JSR @DSET9
MOV.L #1000,ER5 ; 1000mSwait
JSR @WAIT_TLW_TIME
;;;; SET DATA: 01h+FFh+FFh ; 20mA SET
MOV.B #H’01,R0L ;
JSR @DSET1
MOV.B #H’FF,R0L ;
JSR @DSET1
MOV.B #H’FF,R0L ;
JSR @DSET1
JSR @DSET9
MOV.L #1000,ER5 ; 1000mSwait
JSR @WAIT_TLW_TIME
BRA DALP
;;; DA SET 8 BIT
DSET1: MOV.B #8,R0H ;
DSET2: BCLR #4,@P4DR ; DATA: 0
SHLL.B R0L ;
BCC DSET3
BSET #4,@P4DR ; DATA: 1
DSET3: BSET #5,@P4DR ; CLK: 1
BSET #5,@P4DR
BCLR #5,@P4DR ; CLK: 0
DEC.B R0H ;
BNE DSET2
RTS
DSET9: BSET #6,@P4DR ; LACH: 1
BSET #6,@P4DR ; LACH: 1
BCLR #4,@P4DR ; DATA: 0
BCLR #5,@P4DR ; CLK: 0
BCLR #6,@P4DR ; LACH: 0
RTS
4-20mA基板実装

RN42 to BLE V5
高速なペアリングとデータ通信
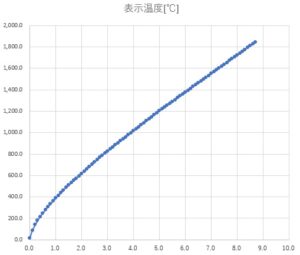
1800℃サーモパル入出特性
入力mV 出力℃
絶縁RS232C 入力7~32V
ADM3202+ADM3251E
New DOS/V
VGA,LCD,SIO,PRT,IDE(CF),PS2
1800℃放射温度計
サーモパイル
チョパアンプ

4-20mA(pcb)
made pcb
絶縁4-20mA
+5V単一電源
TTL out : CLK DATA LTE
TTL in : ERROR
DC/DC : ADUM3471
4-20mA : AD5410/AD5420
